Software skärmdump:
Mjukvaruinformation:
Version: 1.0.2
Ladda upp dagen: 15 Apr 15
Utvecklare: Dihav
Licens: Gratis
Popularitet: 92
Storlek: 11911 Kb
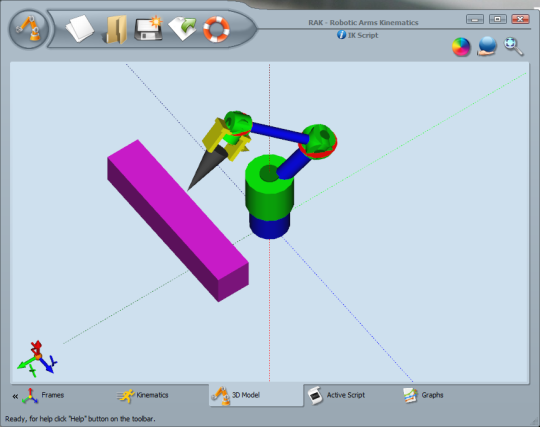
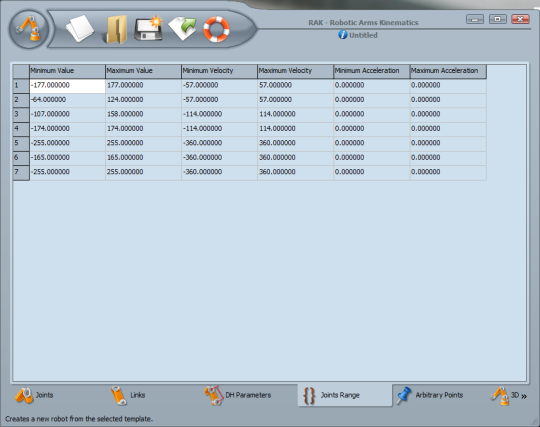
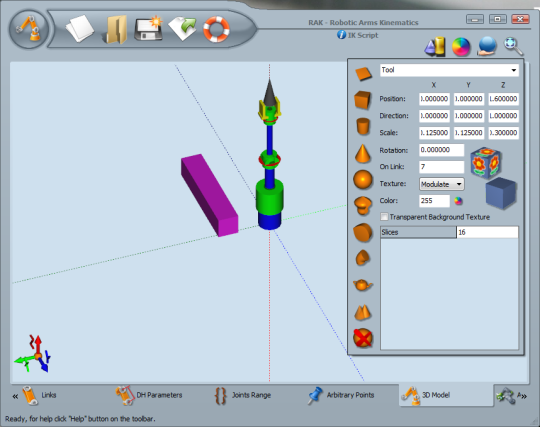
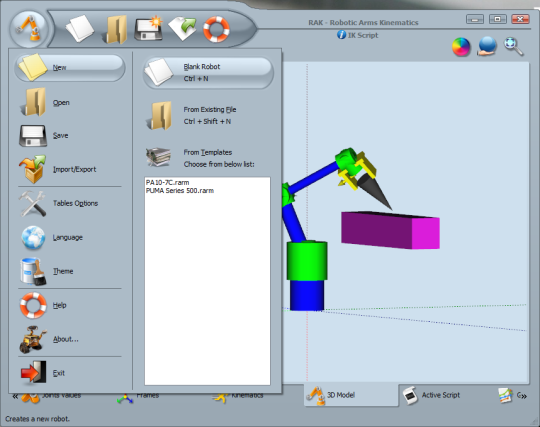
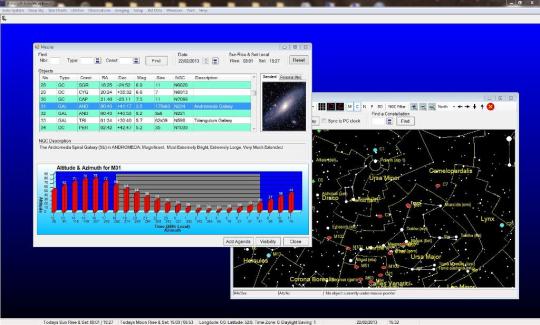
RAK är ett program för modellering robotarmar och beräkna deras kinematik.
Detta program kan simulera öppen slinga, enkel kedja robotar.
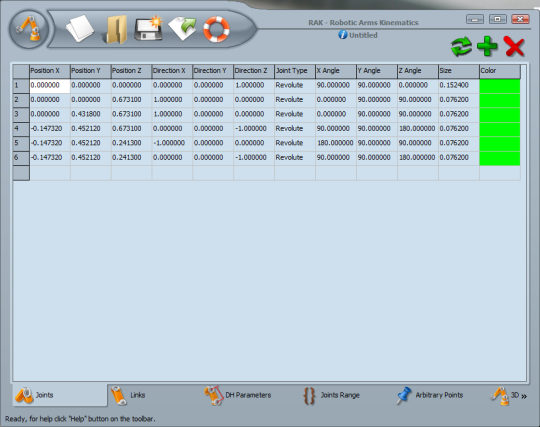
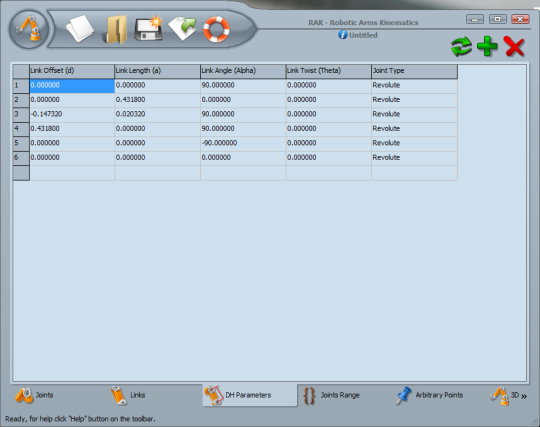
Du kan modellera en robot av dess fogar positioner eller Denavit-Hartenberg (DH) parametrar.
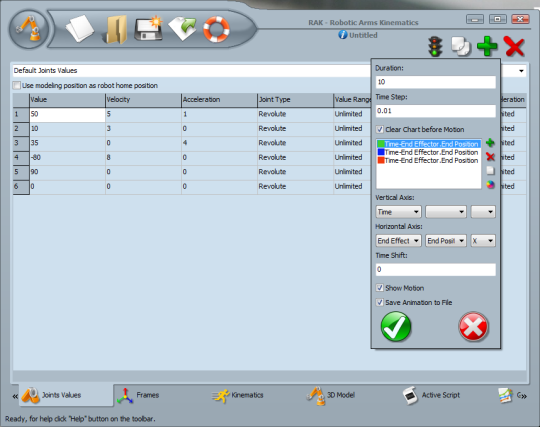
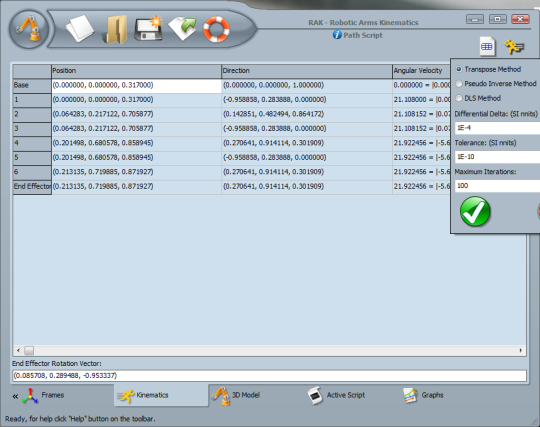
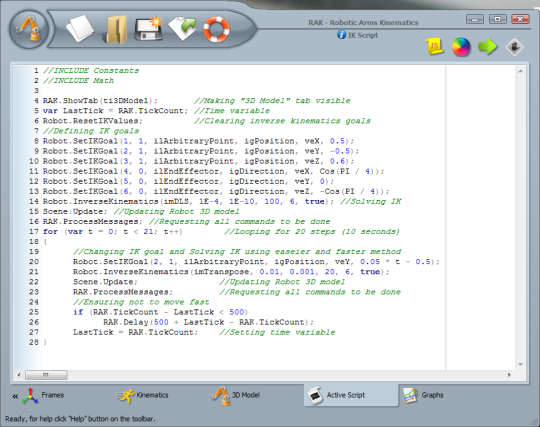
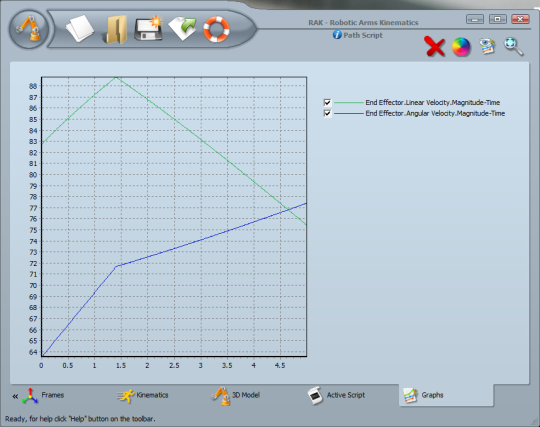
Du kan beräkna kinematik och omvänd kinematik i roboten genom detta program.
Det finns också en programområdet för att skriva program och kontrollera verkliga robotar.

Kommentarer hittades inte