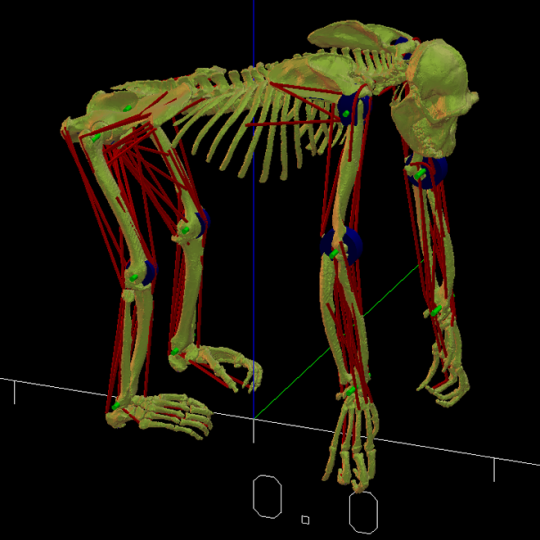
GaitSym är en framåt dynamiskt modelleringsprogram. Vad det betyder är att du anger de krafter och programmet använder Newtons lagar för att beräkna rörelser. Du kan ladda ner den från här inklusive en rad mänskliga och icke-mänskliga 2D- och 3D-modeller för att komma igång. Den använder Open Dynamics Engine fysikmotor för att göra det mesta av det hårda arbetet och ger ett filformat och displaysystem så att användaren inte behöver göra någon programmering. Det ger också olika muskelmodeller så att krafterna kan genereras direkt från muskelaktiveringsnivåer och ett antal krokar för att den ska kunna användas med globala optimeringsverktyg som genetiska algoritmer. Dess viktigaste funktioner är: Snabb, flexibel och robust Framåt Dynamic Modeller; Sofistikerad Kontakta System; Minetti-Alexander och Umberger-Gerritsen-Martin Muscle Modeller för Metabolic kostnadsberäkning; Via Poäng och Cylinderinslag för Muscle Paths; Tröghets Tensor Beräknat från Triangulär Mesh Outline; World eller Lokala koordinatsystem för effektiv modell Creation. Full källkod ingår (C ++ samman på MacOSX, Windows, Linux och andra Unix-system); Komplett med ett flertal humana och icke-mänskliga 2D- och 3D-modeller; Producerar högkvalitativa Stills och animationer via extern Ray-tracing
Vad är nytt i den här versionen:.
Version 2013:
- Ny reglaget gemensamt;
- Ny muskelmodell inklusive senan dämpning, aktiverings kinetik, icke-linjär fjäder respons och bättre numerisk stabilitet;
- Nya box bilförare;
- Ny box geom;
- Ny muskel rem som kan linda runt två parallella cylindrar;
- Direkt punktmoln visualisering;
- Abort på driven gångjärns gemensamma gränsmoment, eller på trösklar uppgifter målgruppen;
- Spårnings position kan kompenseras för att centralisera spårade simuleringar.

Kommentarer hittades inte